

En esta ocasión os traemos una noticia sobre el volcán Etna, situado entre las provincias de Messina y Catánia, en la isla de Sicilia.
Nos encontramos con un volcán del tipo stromboliano, situado en el mar Mediterráneo, con una altura aproximada de 3.350 metros y una extensión de 1.190 hectáreas. Se localiza muy cerca de zonas altamente pobladas, razón por la cual se encuentra ampliamente estudiado.
La última erupción del Etna se produjo hace escasos días durante las navidades, en la noche del 24 de diciembre.
El artículo que os traemos es una traducción al castellano del paper públicado en Science Advances por los investigadores Morelia Urlaub1, Florian Petersen1, Felix Gross2, Alessandro Bonforte3, Giuseppe Puglisi3, Francesco Guglielmino3, Sebastian Krastel2, Dietrich Lange1 and Heidrun Kopp1,2. Os dejamos el enlace al articulo original donde podréis consultar todas las figuras y tablas originales.
INTRODUCCIÓN
Los flancos volcánicos pueden deslizarse en respuesta a varias fuerzas internas y externas. Por ejemplo, la distribución de peso desequilibrada de un edificio volcánico y el “empuje” horizontal debido a las intrusiones magmáticas pueden desencadenar la expansión del flanco. Los flancos inestables pueden fallar de manera catastrófica y provocar deslizamientos de tierra gigantescos, como los que se encuentran en las laderas submarinas de Hawai (1-3). Los colapsos catastróficos de los volcanes de islas oceánicas o los construidos en la costa representan la mayor amenaza, ya que el repentino desplazamiento de grandes cantidades de material en el agua puede provocar tsunamis con efectos extremos (4, 5). La evaluación del potencial de peligro del colapso catastrófico requiere una comprensión profunda de los mecanismos que causan el movimiento del flanco, lo que también es crucial para el diseño de estrategias de monitoreo apropiadas.
Se han propuesto numerosas hipótesis para explicar el deslizamiento del flanco en el Monte Etna, incluidos los aumentos en la presión de magma (6), la actividad eruptiva (7), las intrusiones repetidas del dique (8), el levantamiento del basamento (9), la propagación gravitacional (10), la reorganización gravitacional ( 11), la inestabilidad impulsada por la gravedad acelerada por la inflación y / o las intrusiones laterales (12), o la inflación magmática combinada y la inestabilidad del margen continental (13). Todas las hipótesis son derivadas de dos procesos básicos capaces de desencadenar la inestabilidad del flanco: empuje horizontal de intrusiones magmáticas ascendentes o tirón gravitacional. Estos mecanismos de miembros finales tienen implicaciones de peligro fundamentalmente diferentes: si bien la dinámica del magma puede desencadenar fallas en la pendiente cerca de las vías del magma (14), la deformación gravitacional profunda y profunda puede inducir un colapso catastrófico como en el caso de Mombacho (15), Kilauea (2) , otros volcanes hawaianos (3), y la isla Ritter, Papua Nueva Guinea (16). El consenso general para el Etna ha sido que es principalmente el sistema de tuberías magnético el que impulsa el movimiento del flanco sureste inestable, en lugar de las fuerzas gravitacionales o tectónicas.
Las incertidumbres con respecto a las causas del deslizamiento del flanco se originan en la falta de información sobre la dinámica de la parte submarina del volcán Etna. Las mediciones geodésicas en tierra han documentado movimientos marinos continuos a gran escala a una tasa promedio de 3 a 5 cm por año desde principios de la década de 1980 (8, 10, 17, 18), lo que evidencia de inmediato las tasas más altas en la costa (19, 20). Sin embargo, no existía información sobre el movimiento de la parte submarina del flanco antes de este estudio. Aquí, documentamos la rápida deformación del flanco costa afuera del Etna y combinamos las mediciones costa afuera con la deformación del suelo en tierra. Nuestros datos combinados en tierra y costa afuera definen la dinámica de todo el flanco volcánico.
Mediciones de desplazamiento del fondo marino en el flanco sumergido del Etna.
Las herramientas geodésicas basadas en satélites establecidas no son adaptables para su uso en el medio marino debido a la opacidad del agua de mar a las ondas electromagnéticas. Bajo el agua, las distancias se pueden estimar con la velocidad del sonido del agua y las mediciones del tiempo de viaje entre los transpondedores en el fondo marino. Las interrogaciones acústicas periódicas de ida y vuelta entre varios transpondedores equipados con sensores de presión absoluta y dispuestos en una red permiten la determinación continua del desplazamiento del fondo marino en direcciones horizontales y verticales dentro de la red (21–23). Una red de cinco de estos transpondedores se colocó a ambos lados del límite sur sumergido del flanco inestable del Etna (24) a una profundidad de agua de ~ 1200 m. Los cambios en la distancia entre los transpondedores a través de la falla y el aumento de la presión en los transpondedores al norte de la falla indican el movimiento del flanco presumiblemente inestable en relación con el entorno estable. Nuestra red de fondo marino es la primera en monitorear un evento de deslizamiento de resaca en alta mar en resolución subcentimétrica, lo que demuestra la viabilidad del método de rango de trayectoria directa acústica emergente para monitorear la inestabilidad del flanco volcánico.
En tierra, el contorno espacial del flanco inestable está bien definido por métodos geodésicos, geofísicos y geológicos (Fig. 1): a lo largo del límite norte del flanco inestable, la deformación se enfoca a lo largo de la falla Pernicana del lado izquierdo (17). Hacia el sur, los sistemas de fallas Tremestieri y Acitrezza (ATF) lateral derecho acogen la mayor parte del movimiento del flanco (17, 25). Frente a la costa, la cresta de Riposto forma la prolongación del límite norte. En dirección distal, dos anticlinales observados en los datos de reflexión sísmica marcan la terminación hacia el mar del flanco volcánico inestable (Fig. 1) (24). Al sur, una falla transpresiva lateral derecha al norte de Catania Canyon, interpretada como la prolongación de los sistemas de fallas en tierra, representa el límite sur del flanco inestable (13, 24).
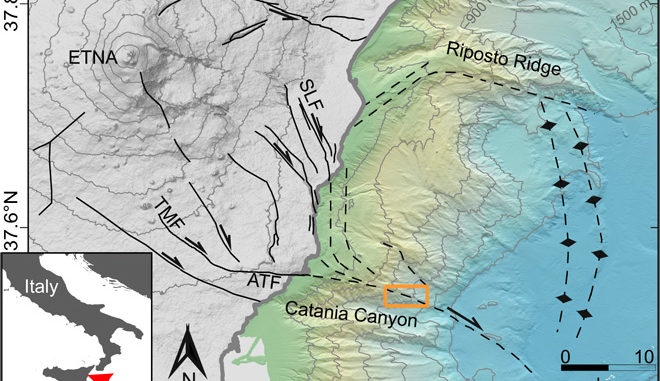
Fig. 1: Mapa morfológico del monte Etna que incluye características tectónicas del flanco SE. Topografía en tierra en gris y batimetría en tierra en colores verde a azul. El intervalo de la linea de contorno es de 300 m. Las características principales se muestran como líneas negras discontinuas (24) y sólidas (38). La gruesa línea gris delinea la costa. El rectángulo naranja marca la ubicación de la red geodésica del fondo marino.
RESULTADOS
Para la mayoría de las partes del período de observación, las distancias acústicas entre los transpondedores se mantuvieron estables en aproximadamente 0.5 cm (Fig. 2 y Fig. S2). Sin embargo, se produjo un cambio significativo en las distancias entre el 12 y el 20 de mayo de 2017. Solo las líneas de base a través de la falla registraron el movimiento de falla asísmica de 8 días que se destaca del ruido de fondo (Fig. 2 y Fig. S2). Los cambios de distancia relativa durante el evento de mayo de 2017 oscilaron entre 0,6 y −3,9 cm para diferentes pares de transpondedores (Tabla 1, Fig. 2 y Fig. S2). Como se esperaba para una falla de deslizamiento por impacto dextral, los cambios de longitud dependen del ángulo de la línea de base con la falla (fig. S3). Este ángulo se puede utilizar para determinar el verdadero deslizamiento de falla. La principal incertidumbre en el deslizamiento se debe a la falta de conocimiento de la traza exacta de la falla en el fondo marino. Los datos de rango confirman que la traza de falla debe ejecutarse en el corredor muy estrecho entre los transpondedores 1 y 3 (Fig. 2C) dentro de un rango de 5 °. Teniendo en cuenta todas las líneas de base de cruce de fallas, el verdadero deslizamiento está entre 3.87 y 4.23 cm (Tabla 1). También observamos que los transpondedores en el lado norte de la falla mostraron un desplazamiento vertical hacia abajo de 1 cm con respecto a los del lado sur durante el evento de mayo de 2017 (Fig. 2 y Fig. S4).
En general, no se produjeron cambios significativos en las distancias o profundidades entre los transpondedores que estaban ubicados en el mismo lado de falla (Fig. 2 y figs. S2 a S4). Excluimos la posibilidad de un deslizamiento de tierra local que mueva estos transpondedores de manera coherente debido a la falta de evidencia de sedimentos blandos en datos sísmicos y de ecosonda de sedimentos, así como en muestras de fondos marinos. Los cambios de distancia observados son, en todos los aspectos, consistentes con el movimiento de deslizamiento lateral derecho que separa los transpondedores 2, 3 y 5 de los transpondedores 1 y 4 (Fig. 2C).
En particular, el cambio de longitud observado en la red de ~ 4 cm proporciona una estimación mínima del deslizamiento verdadero a lo largo de la falla durante el evento de mayo de 2017. El movimiento grueso del flanco inestable podría no haberse capturado completamente, lo que llevó a una posible subestimación del deslizamiento. La falla del límite sur se divide en varias ramas hacia el fondo marino, como se muestra en los datos sísmicos (fig. S1) (24). Sin embargo, la red de transpondedores no abarca todas las ramas de falla. Las sucursales fuera del alcance de nuestra red también pueden haber acomodado el movimiento de flanco durante el período de tiempo investigado.
Un deslizamiento de 4 cm corresponde a una magnitud de momento de liberación equivalente a un Mw de 4.3 a 5.3 terremoto (26). Desde el inicio de la grabación sísmica instrumental en Etna en la década de 1980, no se ha observado ningún terremoto con una magnitud superior a 4 en el área (27). Por lo tanto, el principal estilo de deformación del flanco volcánico en alta mar es la rotura episódica y asísmica en lugar de la ruptura sísmica.
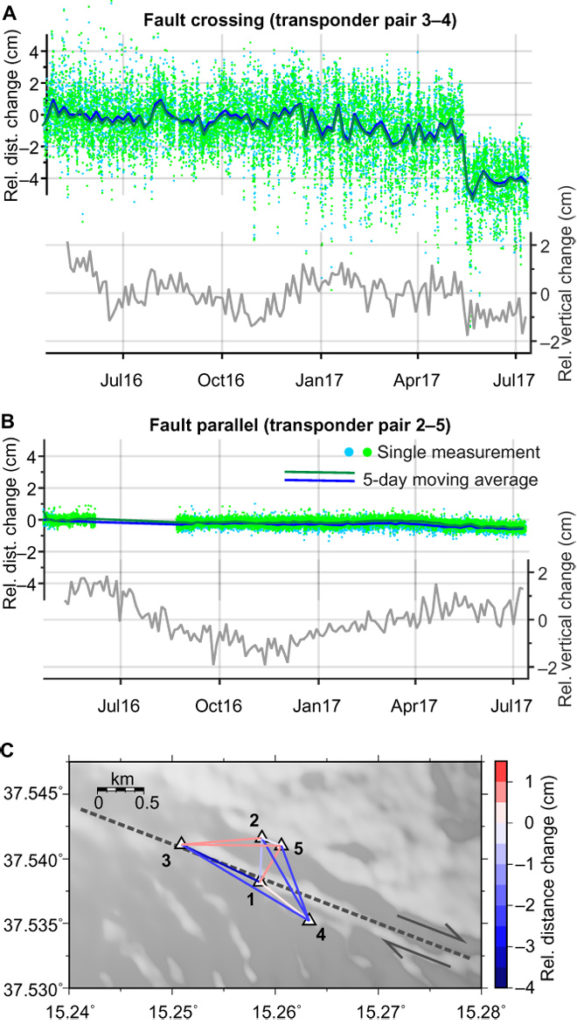
Fig. 2: La deformación del fondo marino a través de la falla que marca el límite sur de la costa del inestable flanco del Monte Etna, según lo registrado por la red de cinco transpondedores de monitoreo autónomos.
(A y B) Cambios relativos en las distancias entre los pares de transpondedores (los colores azul y verde indican la interrogación activa y la respuesta pasiva de las señales acústicas respectivamente) y el desplazamiento vertical relativo entre los pares de transpondedores (línea gris, promedio móvil de 3 días). Las series de teimpo para todos los demás pares de transpondedores se muestran en las fig. S2 y S3.
(C) Vista de mapa de los cambios de distancia relativa dentro de la matriz durante el período de observación trazado en batimetría sombreada en gris (vea fig.1). Los números negros indican los números del transpondedor.
Dinámica general del flanco.
Nuestras observaciones en alta mar muestran que la parte submarina del flanco sureste del Monte Etna se mueve en dirección este y hacia abajo con un deslizamiento de falla asísmico mínimo de al menos 4 y 1 cm de hundimiento relativo, respectivamente (Fig. 2). El deslizamiento total puede ser incluso mayor ya que no todas las ramas de falla podrían ser capturadas por la red del fondo marino (fig. S1). En tierra, el movimiento del flanco hacia el mar en Etna en el período de observación de abril de 2016 a julio de 2017 se manifestó en una deformación continua (fig. S8) en lugar de en un deslizamiento episódico, como se observa en alta mar. Los desplazamientos acumulativos fueron más altos a lo largo de la costa (Fig. 3). SISTEM (estimación simultánea e integrada del tensor de deformación a partir de mediciones de deformación geodésica y satelital) datos de GPS (fig. S5) y DInSAR (radar de apertura sintética por interferometría diferencial) (fig. S6) (28) muestra que el movimiento del flanco se produjo principalmente en el ATF y falla de San Leonardello (Fig. 3 y fig. S7) con un deslizamiento máximo de ~ 2 cm a lo largo de cada falla. El movimiento del flanco costa afuera fue, por lo tanto, en el mismo orden de magnitud que la suma de los resbalones de falla en tierra durante períodos de tiempo idénticos. Por lo tanto, la falla costa afuera probablemente acumuló el deslizamiento tanto de la falla ATF como la falla de San Leonardello.

Los movimientos brutos en tierra y en alta mar son cinemáticamente consistentes (Fig. 4) y, por lo tanto, son expresiones del mismo proceso subyacente relacionado con la inestabilidad del flanco. Las diferencias observadas en el modo de deslizamiento de fallas durante el período de observación, es decir, el arrastre continuo en tierra y el deslizamiento lento en la costa, pueden ser el resultado de variaciones en las propiedades de falla, como la temperatura, la presión del fluido o el material de la gubia (29), al tiempo que representan el mismo Dinámica general. Sin embargo, la deformación en tierra en el flanco inestable del Etna también se manifiesta en eventos de deslizamiento lento a lo largo de la costa, según lo monitoreado por GPS continuo (8).
DISCUSIÓN
Las razones de la inestabilidad del flanco sureste del Monte Etna se han relacionado con el sistema de tuberías magmático del volcán o con las fuerzas gravitacionales. El desplazamiento inducido por la inyección de magma decae fuertemente con la distancia al dique (30). Se espera que la inflación del edificio volcánico causado por el magma en ascenso provoque los mayores desplazamientos cerca del centro volcánico, lo cual es inconsistente con nuestros datos. En contraste, nuestras mediciones geodésicas demostraron que el movimiento del flanco aumenta desde la cima hacia la costa y hacia el mar Jónico, mientras que no se observó un aumento en la actividad de magma simultáneamente al evento en alta mar de mayo de 2017, lo que implica que la dinámica del magma no puede ser la única responsable de la Patrón de deformación observado. La comparación del deslizamiento de fallas en tierra y costa afuera sugiere que la deformación en alta mar se enfoca a lo largo de una falla al norte de Catania Canyon y que la tensión se divide cerca de la costa en dos sistemas de fallas (Fig. 4). Las observaciones de (i) la mayor deformación lejos de y (ii) la separación de la deformación hacia la cumbre indican que la zona de cizallamiento basal que acomoda el movimiento del flanco comenzó en alta mar y se ha desarrollado de forma retrógrada hacia tierra. Por lo tanto, el mecanismo de fuerza que controla la mayor parte del movimiento de flanco del Monte Etna debe tener su origen hacia el mar y está separado del edificio volcánico. La atracción gravitacional del margen continental que se hunde es un desencadenante tectónico potencial (17).

Fig. 4: Representación de deslizamiento de fallas ene le cruce del litoral del movimiento del flanco SE del Etna. Las áreas pobladas se obtienen de una clasificación Landsat-8 en una cuadrícula de 30 m por 30 m (imagen Landsat-8, cortesía del USGS). Las líneas en negrita representan las principales características activas durante el período de observación.
Sin embargo, la actividad magmática también influye en el movimiento de flanco, ya que las aceleraciones episódicas del movimiento de flanco en tierra se han relacionado con las intrusiones de diques y el ascenso de magma repetidamente (8, 25). Los análisis de datos sísmicos en tierra y de deformación del suelo muestran un claro desacoplamiento de los regímenes de deformación superficial y profunda debajo del flanco oriental a una profundidad de 2 km durante un período de inflación (31). La inflación y las intrusiones de diques pueden favorecer las aceleraciones episódicas del movimiento del flanco, además del deslizamiento gravitacional continuo a gran escala. Ambos procesos pueden interactuar e influir entre sí, como lo demuestran los modelos analógicos (32).
Los registros geológicos marinos de las Islas Canarias documentan que las fallas en el flanco submarino a gran escala se produjeron en múltiples etapas, todas ellas antes de erupciones explosivas (33). Un patrón similar se registra en los núcleos de sedimentos en el flanco sumergido del Etna, donde las capas de ceniza cubren los depósitos de deslizamientos de tierra (34). Estas observaciones apoyan además una interacción estrecha del movimiento del flanco y la actividad magmática. Sin embargo, las erupciones no provocan colapsos catastróficos en los flancos, lo que implica que el deslizamiento gravitatorio es el proceso que rige.
Nuestros resultados muestran que solo la combinación de datos de deformación de tierra en tierra y costa afuera proporciona una imagen clara de la dinámica general del flanco del volcán, desde la cual se puede evaluar el peligro de un catastrófico colapso del flanco. En el caso del Monte Etna, nuestro análisis de deformación que cruza la línea de la costa implica un riesgo mayor para el colapso del flanco de lo que se suponía anteriormente, ya que el deslizamiento gravitatorio profundo puede potencialmente provocar un colapso catastrófico (2, 3, 16). Los análisis de deformación en el suelo en tierra revelan signos de inestabilidad de flanco en curso en numerosos volcanes costeros y de islas oceánicas en la actualidad (35). Los volcanes, incluidos los de Hawái, las Islas Canarias y La Reunión, pueden colapsar, pero se necesitan análisis de deformación del terreno que atraviesan la costa para obtener una visión completa de la dinámica y limitar el peligro. Nuestros resultados demuestran que las investigaciones geodésicas del fondo marino son capaces de caracterizar la dinámica de los flancos volcánicos sumergidos y que dichas investigaciones proporcionan datos de deformación en una resolución comparable a la del GPS.
MATERIALES Y MÉTODOS
Batimetría
Los datos batimétricos se adquirieron durante la embarcación de investigación (RV) Meteor Expedition M86 / 2 en 2012 con sondas multihaz Kongsberg Simrad EM122 y EM710 montadas en el casco. El procesamiento de datos estándar con MB-System produjo una cuadrícula con un tamaño de celda de 30 m por 30 m. La batimetría costera se adquirió en el marco del proyecto MaGIC (Marine Geohazards a lo largo de la costa italiana) (36).
Geodesia del fondo marino
El método de rango acústico de trayectoria directa proporciona un posicionamiento relativo mediante el uso de transpondedores acústicos de alta precisión [Sonardyne Autonomous Monitoring Transponders (AMT)]. Los múltiples transpondedores instalados en el lecho marino miden el tiempo de vuelo de las señales acústicas entre ellos con una resolución de microsegundos y la velocidad del sonido del agua, la temperatura y la presión absoluta. Las observaciones del tiempo de viaje se convirtieron en distancias con precisión milimétrica. Las mediciones de presión proporcionaron información sobre el desplazamiento vertical. Los inclinómetros de doble eje detectaron cambios en la inclinación del instrumento. Los interrogatorios repetidos durante meses o años permitieron determinar los desplazamientos y, por lo tanto, la deformación del fondo marino dentro de la red durante períodos prolongados, dependiendo de la capacidad de la batería.
Aquí, usamos cinco transpondedores de la matriz GeoSEA de GEOMAR. Los transpondedores se comunicaron con pulsos de códigos de fase de 8 ms y un ancho de banda de 8 kHz con una frecuencia centrada de 18 kHz. Los rangos acústicos se calcularon por correlación cruzada de las señales de interrogación y recepción. Los AMT registraron presión, temperatura, inclinación y velocidad de sonido. El período de registro para cada transpondedor se estableció en 90 minutos. Notamos inestabilidad en la medición de la velocidad del sonido y recalcularon la velocidad del sonido utilizando las mediciones de temperatura y presión de alta resolución en cada transpondedor y asumiendo una salinidad constante de 34 unidades prácticas de salinidad (37). Eliminamos las señales de marea de los datos de presión utilizando los datos proporcionados por el Instituto Superior de Protección de Marea Ambiental en el puerto de Catania (www.mareografico.it). La presión se convirtió a profundidad con una densidad de agua de mar de 1024 kg / m3. Para una mejor comparación con las mediciones de distancia relativa obtenidas por telemetría acústica, y como estamos interesados principalmente en el movimiento relativo del sector inestable en comparación con el sector estable, solo mostramos el desplazamiento vertical relativo entre pares de transpondedores. Estos se obtuvieron restando las series de tiempo registradas por un transpondedor de la de otro transpondedor.
Los transpondedores de monitoreo autónomos estaban ubicados en el afloramiento de una falla en el fondo marino. Las ubicaciones para los transpondedores individuales se eligieron sobre la base de un levantamiento sísmico bidimensional (2D) de alta resolución y espacios espaciados de forma batimétrica. El diseño de la red garantiza que al menos dos AMT se encuentren a cada lado de la falla y estén a la vista de la otra. Los AMT fueron montados en cuerpos de flotabilidad anclados. La configuración desplegada en forma de trapecio da como resultado 10 líneas de base monitoreadas. Además del transpondedor 1, todas las líneas base se registraron en dos direcciones (mediciones hacia adelante y hacia atrás), lo que dio como resultado seis líneas base bidireccionales y cuatro líneas base unidireccionales. Las distancias para adelante (por ejemplo, midiendo el tiempo de viaje de AMT 1 a 2 y retorno) y las mediciones hacia atrás (midiendo de AMT 2 a 1 y retorno) concuerdan estrechamente con todos los pares de transpondedores.
Implementamos los transpondedores en abril de 2016 durante la expedición RV Poseidon POS496 a una precisión del medidor utilizando un posicionamiento acústico de línea base ultracorta en profundidades de agua de 950 a 1180 m. Los datos almacenados en cada estación se cargaron desde el fondo marino a la superficie con un módem acústico.
Geodesia en tierra
Procesamos e integramos los datos en tierra que cubren el mismo período que las adquisiciones de datos en alta mar para comparar los resultados y ampliar la información sobre la deformación medida por la red del fondo marino. Los datos de GPS recolectados durante la primera semana de abril de 2016 y la última semana de julio de 2017 se procesaron por separado utilizando el método habitual adoptado para los estudios geodésicos (38) para obtener las coordenadas más precisas de cada estación en los dos períodos. Así, los desplazamientos 3D en las estaciones de GPS de abril de 2016 a julio de 2017 se obtuvieron comparando los dos conjuntos de coordenadas.
Los datos de Sentinel-1A ascendente (31 de marzo de 2016 y 30 de julio de 2017) y descendente (6 de abril de 2016 y 30 de julio de 2017) fueron procesados por el software GAMMA, utilizando la llamada interferometría de dos pasos (39) para generar los productos interferométricos. Se utilizó un método de diversidad espectral para registrar de nuevo los pares Sentinel-1 para obtener una precisión extremadamente alta (<0.01 píxeles). El resultado de este procesamiento es el desplazamiento del terreno a lo largo de la Línea de visión (LOS) en toda el área. Para derivar los mapas de movimiento de superficie 3D, integramos los desplazamientos GPS y DInSAR aplicando el método SISTEM (28). Una ecuación de matriz lineal representa tanto los datos de GPS como los de DInSAR, cuya solución proporciona el tensor de tensión, el campo de desplazamiento y el tensor de rotación del cuerpo rígido en toda el área investigada.
Referencias y notas
- ↵ J. G. Moore, D. A. Clague, R. T. Holcomb, P. W. Lipman, W. R. Normark, M. E. Torresan, Prodigious submarine landslides on the Hawaiian Ridge. J. Geophys. Res. 94, 17465–17484 (1989).Google Scholar
- ↵J. K. Morgan, G. F. Moore, D. J. Hills, S. Leslie, Overthrusting and sediment accretion along Kilauea’s mobile south flank, Hawaii: Evidence for volcanic spreading from marine seismic reflection data. Geology28, 667–670 (2000).Abstract/FREE Full TextGoogle Scholar
- ↵R. P. Denlinger, J. K. Morgan, Instability of Hawaiian volcanoes, in Characteristics of Hawaiian Volcanoes, M. P. Poland, T. J. Takahashi, C. M. Landowski, Eds. (Professional Paper 1801, U.S. Geological Survey, 2014).Google Scholar
- ↵ B. H. Keating, W. J. McGuire, Island edifice failures and associated tsunami hazards. Pure Appl. Geophys. 157, 899–955 (2000).Google Scholar
- ↵ R. S. Ramalho, G. Winckler, J. Madeira, G. R. Helffrich, A. Hipólito, R. Quartau, K. Adena, J. M. Schaefer,Hazard potential of volcanic flank collapses raised by new megatsunami evidence. Sci. Adv. 1, e1500456(2015).FREE Full TextGoogle Scholar
- ↵ P. Lundgren, F. Casu, M. Manzo, A. Pepe, P. Berardino, E. Sansosti, R. Lanari, Gravity and magma induced spreading of Mount Etna volcano revealed by satellite radar interferometry. Geophys. Res. Lett.31, L04602 (2004).CrossRefGoogle Scholar
- ↵ V. Acocella, B. Behncke, M. Neri, S. D’Amico, Link between major flank slip and 2002–2003 eruption at Mt. Etna (Italy). Geophys. Res. Lett. 30, 2286 (2003).CrossRefGoogle Scholar
- ↵ V. Bruno, M. Mattia, E. Montgomery-Brown, M. Rossi, D. Scandura, Inflation leading to a Slow Slip Event and volcanic unrest at Mt. Etna in 2016: Insights from CGPS data. Geophys. Res. Lett. 44, 12141–12149(2017).Google Scholar
- ↵ I. Stewart, W. J. McGuire, C. Vita-Finzi, C. Firth, R. Holmes, S. Saunders, Active faulting and neotectonic deformation on the eastern flank of Mount Etna, Sicily. Zeits. Geomorph. 94, 73–94 (1993).Google Scholar
- ↵ A. Borgia, L. Ferrari, G. Pasquarè, Importance of gravitational spreading in the tectonic and volcanic evolution of Mount Etna. Nature 357, 231–235 (1992).CrossRefWeb of ScienceGoogle Scholar
- ↵ O. Merle, A. Borgia, Scaled experiments of volcanic spreading. J. Geophys. Res. 101, 13805–13817(1996).Google Scholar
- ↵ A. Bonforte, A. Bonaccorso, F. Guglielmino, M. Palano, G. Puglisi, Feeding system and magma storage beneath Mt. Etna as revealed by recent inflation/deflation cycles. J. Geophys. Res. 113, B05406 (2008).Google Scholar
- ↵ F. L. Chiocci, M. Coltelli, A. Bosman, D. Cavallaro, Continental margin large-scale instability controlling the flank sliding of Etna volcano. Earth Planet Sci. Lett. 305, 57–64 (2011).Google Scholar
- ↵ A. Bonforte, F. Guglielmino, Very shallow dyke intrusion and potential slope failure imaged by ground deformation: The 28 December 2014 eruption on Mount Etna. Geophys. Res. Lett. 42, 2727–2733 (2015).Google Scholar
- ↵ B. van Wyk de Vries, P. W. Francis, Catastrophic collapse at stratovolcanoes induced by gradual volcano spreading. Nature 387, 387–390 (1997).CrossRefWeb of ScienceGoogle Scholar
- ↵J. Karstens, M. Urlaub, C. Berndt, S. F. L. Watt, A. Micaleff, I. Klaucke, D. Klaeschen, S. Brune, M. Kühn, The complex emplacement dynamics and tsunami genesis of the 1888 Ritter Island sector collapse from 3D seismic data, paper presented at the AGU Fall Meeting, New Orleans, LA, 11 to 15 December 2017.Google Scholar
- ↵ A. Bonforte, F. Guglielmino, M. Coltelli, A. Ferretti, G. Puglisi, Structural assessment of Mount Etna volcano from permanent scatterers analysis. Geochem. Geophys. Geosyst. 12, Q02002 (2011).Google Scholar
- ↵ D. Patanè, P. De Gori, C. Chiarabba, A. Bonaccorso, Magma ascent and the pressurization of Mount Etna’s volcanic system. Science 299, 2061–2063 (2003).Abstract/FREE Full TextGoogle Scholar
- ↵ G. Puglisi, A. Bonforte, Dynamics of Mount Etna Volcano inferred from static and kinematic GPS measurements. J. Geophys. Res. 109, B11404 (2004).Google Scholar
- ↵ N. Houlié, P. Briole, A. Bonforte, G. Puglisi, Large scale ground deformation of Etna observed by GPS between 1994 and 2001. Geophys. Res. Lett 33, L02309 (2006).Google Scholar
- ↵ J. J. McGuire, J. A. Collins, Millimeter-level precision in a seafloor geodesy experiment at the discovery transform fault, East Pacific Rise. Geochem. Geophys. Geosyst. 14, 4392–4402 (2013).Google Scholar
- Bürgmann, D. Chadwell, Seafloor geodesy. Annu. Rev. Earth Planet Sci. 42, 509–534 (2014).CrossRef Google Scholar
- ↵B. A. Brooks, J. H. Foster, J. J. McGuire, M. Behn, Submarine landslides and slow earthquakes: Monitoring motion with GPS and seafloor geodesy, in Encyclopedia of Complexity and System Science, W. Lee, Ed. (Springer, 2011), pp. 889–907.Google Scholar
- ↵
- F. Gross, S. Krastel, J. Geersen, J. H. Behrmann, D. Ridente, F. L. Chiocci, J. Bialas, C. Papenberg, D.Cukur, M. Urlaub, A. Micallef, The limits of seaward spreading and slope instability at the continental margin offshore Mt Etna, imaged by high resolution 2D seismic data. Tectonophysics 667, 63–76 (2016).Google Scholar
- ↵ A. Bonforte, F. Guglielmino, G. Puglisi, Interaction between magma intrusion and flank dynamics at Mt. Etna in 2008, imaged by integrated dense GPS and DInSAR data. Geochem. Geophys. Geosyst. 14, 2818–2835 (2013).Google Scholar
- ↵ T. C. Hanks, H. Kanamori, H. A. Moment Magnitude Scale. J. Geophys. Res. 84, 2348–2350 (1979).Google Scholar
- ↵ S. Alparone, A. Bonaccorso, A. Bonforte, G. Currenti, Long-term stress-strain analysis of volcano flank instability: The eastern sector of Etna from 1980 to 2012. J. Geophys. Res. 18, 5098–5108 (2013).Google Scholar
- ↵ F. Guglielmino, C. Bignami, A. Bonforte, P. Briole, F. Obrizzo, G. Puglisi, S. Stramondo, U. Wegmüller,Analysis of satellite and in situ ground deformation data integrated by the SISTEM approach: The April 3, 2010 earthquake along the Pernicana fault (Mt. Etna – Italy) case study. Earth Planet. Sci. Lett. 312, 327–336 (2011).Google Scholar
- ↵C.H. Scholz, The Mechanics of Earthquakes and Faulting (Cambridge Univ. Press, 2002).Google Scholar
- ↵ D. Elsworth, B. Voight, Dike intrusion as a trigger for large earthquakes and the failure of volcano flanks. J. Geophys. Res. 100, 6005–6024 (1995).Google Scholar
- ↵ S. Alparone, G. Barberi, A. Bonforte, V. Maiolino, A. Ursino, Evidence of multiple strain fields beneath the eastern flank of Mt. Etna volcano (Sicily, Italy) deduced from seismic and geodetic data during 2003–2004. Bull. Volcanol. 73, 869–885 (2011).Google Scholar
- ↵ N. Le Corvec, T. R. Walter, J. Ruch, A. Bonforte, G. Puglisi, Experimental study of the interplay between magmatic rift intrusion and flank instability with application to the 2001 Mount Etna eruption. J. Geophys. Res. 119, 5356–5368 (2014).Google Scholar
- ↵ J. Hunt, M. Cassidy, P. J. Talling, Multi-stage volcanic island flank collapses with coeval explosive caldera-forming eruptions. Sci. Rep. 8, 1146 (2018).Google Scholar
- ↵ F. Gross, S. Krastel, F. L. Chiocci, D. Ridente, J. Bialas, J. Schwab, J. Beier, D. Cukur, D. Winkelmann, Evidence for Submarine Landslides Offshore Mt. Etna, Italy, in 6th International Symposium. Submarine Mass Movements and Their Consequences. Advances in Natural and Technological Hazards Research, S. Krastel, J.-H. Behrmann, D. Völker, M. Stipp, C. Berndt, R. Urgeles, J. Chaytor, K. Huhn, M. Strasser, C. B. Harbitz, Eds. (Springer, 2014), vol. 37, pp. 307–316.Google Scholar
- ↵ M. P. Poland, A. Peltier, A. Bonforte, G. Puglisi, The spectrum of persistent volcanic flank instability: A review and proposed framework based on Kīlauea, Piton de la Fournaise, and Etna. J. Volcanol. Geotherm. Res. 339, 63–80 (2017).Google Scholar
- ↵ F. L. Chiocci, D. Ridente, Regional-scale seafloor mapping and geohazard assessment. The experience from the Italian project MaGIC (Marine Geohazards along the Italian Coasts). Mar. Geophys. Res. 32, 13–23 (2011).Google Scholar
- ↵ V. Leroy, A. Strybulevych, J. H. Page, M. G. Scanlon, Sound velocity and attenuation in bubbly gels measured by transmission experiments. J. Acoust. Soc. Am. 123, 1931–1940 (2008).PubMedGoogle Scholar
- ↵ G. Barreca, A. Bonforte, M. Neri, A pilot GIS database of active faults of Mt. Etna (Sicily): A tool for integrated hazard evaluation. J. Volcanol. Geotherm. Res. 251, 170–186 (2013).Google Scholar
- ↵ D. Massonnet, K. L. Feigl, Radar interferometry and its application to changes in the Earth’s surface.Rev. Geophys. 36, 441–500 (1998).Google Scholar
- ↵ S. Ide, G. C. Beroza, D. R. Shelly, T. Uchide, A scaling law for slow earthquakes. Nature 447, 76–79(2007).CrossRefPubMedWeb of ScienceGoogle Scholar
Dejar una contestacion